-
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 28.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 28.00 -
×
 Programador USBASP ISP para ATMEL AVR
1 × $ 101.00
Programador USBASP ISP para ATMEL AVR
1 × $ 101.00 -
×
VS1053B Reproductor MP3 TF Shield Arduino
1 × $ 195.00
-
×
UNIT Pi Pico Kit de Iniciación para Raspberry Pi Pico
1 × $ 350.38
 Programador USBASP ISP para ATMEL AVR
Programador USBASP ISP para ATMEL AVR  VS1053B Reproductor MP3 TF Shield Arduino
VS1053B Reproductor MP3 TF Shield Arduino 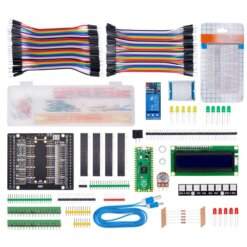 UNIT Pi Pico Kit de Iniciación para Raspberry Pi Pico
UNIT Pi Pico Kit de Iniciación para Raspberry Pi Pico Puede que estés interesado en…
-
Add
 Conector de Audio XLR 3 Pines Plateado Hembra y Macho
$ 59.00
Conector de Audio XLR 3 Pines Plateado Hembra y Macho
$ 59.00 -
Add
LM386 Módulo Amplificador de Audio 200x 5V-12V
$ 24.00
-
Add
ATMEGA8-16PU Microcontrolador DIP-28
$ 97.00
-
Add
Desoldador de Succión DP-366D
$ 35.00
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
Conector Push para Bocinas 2 / 4 Vías
$ 10.00 – $ 13.00













Valoraciones
No hay valoraciones aún.