






BTS7960 Driver Puente H 43A
$ 119.00
Sin existencias en TIENDA EN LÍNEA
INTRODUCE TU CORREO Y TE AVISAMOS CUANDO ESTE DISPONIBLE
INFORMACIÓN
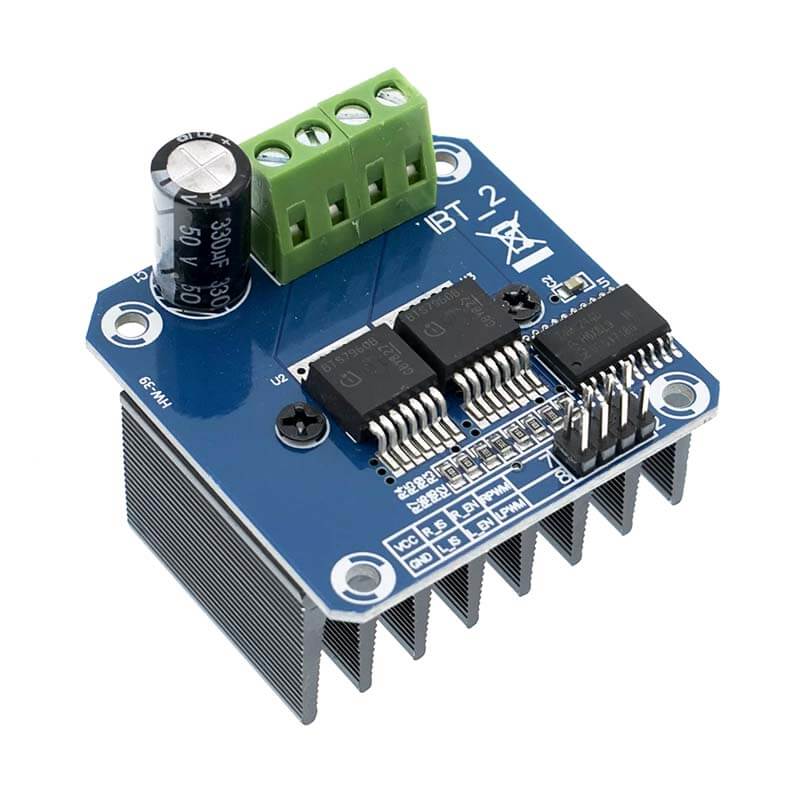
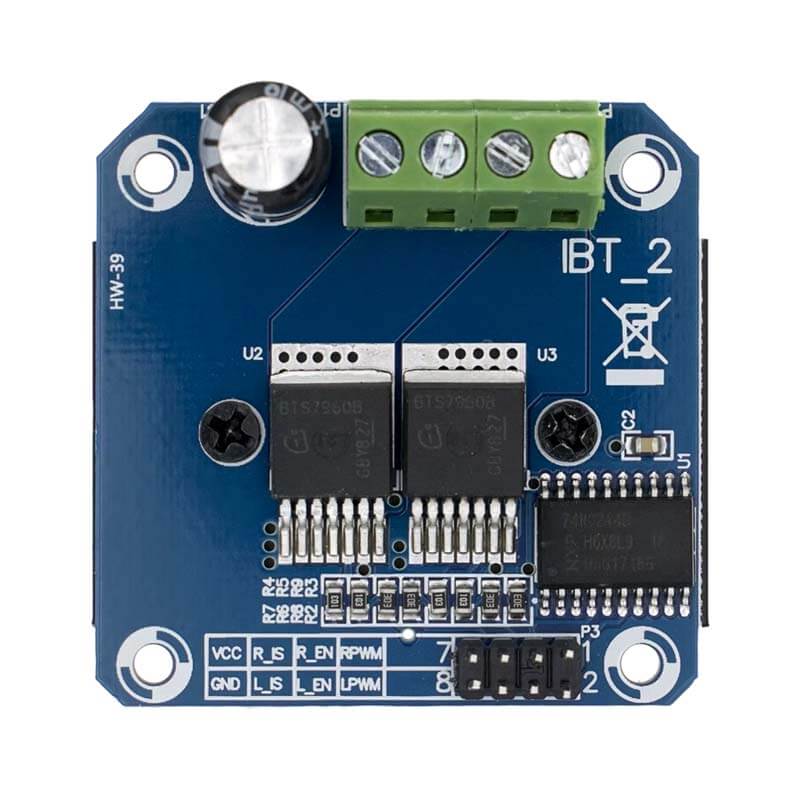
El BTS7960 Driver Puente H 43A es un modulo para controlar motores de alta potencia, con protección térmica contra sobrecorriente capaz de manejar corrientes elevadas (hasta 43A en picos). Cuenta con aislamiento y protección hacia microcontrolador.
El BTS7960 Driver Puente H 43A es ideal en aplicaciones donde se necesita controlar el movimiento o la fuerza de un motor para robots de servicio, robots industriales, controlar la dirección y velocidad de motores de corriente continua (DC): vehículos eléctricos pequeños (como scooters, bicicletas eléctricas, y vehículos de juguete), motores de alto rendimiento que requieren gran potencia; el driver puede ser controlado mediante una señal de modulación por ancho de pulso (PWM) para ajustar la velocidad del motor, lo que lo hace ideal para aplicaciones que requieren control preciso de la velocidad.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Tipo: Puente H
- Modelo: HW-039
- Controlador: BTS7960
- Voltaje:
- Alimentación: 5.5V a 27V
- Control: 3.3V a 5V TTL
- Corriente: 43A máx.
- Corriente de consumo: 2mA (3mA máx.)
- Frecuencia PWM: 25 kHz
- Control: PWM (2 entradas)
- Protección contra sobre-voltaje
- Apagado térmico de protección y por caída de voltaje
- Dimensiones: 50 mm x 50 mm
- Peso: 57.72g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
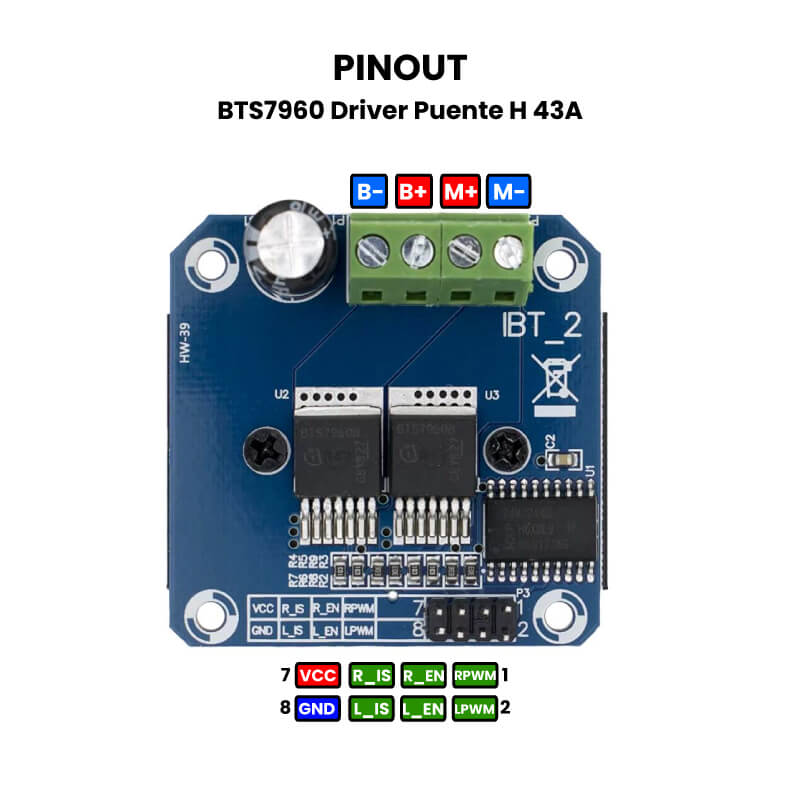
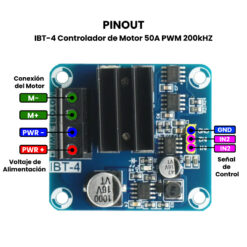
Configuración de pines
- R_PWM: Pulso de control derecho
- L_PWM: Pulso de control izquierdo
- R_EN: Activa salida derecha
- L_EN: Activa salida izquierda
- R_IS: Salida medición de corriente derecha
- L_IS: Salida medición de corriente izquierda
- VCC: Salida de alimentación 5V
- GND: Negativo
Aplicaciones
- Robots de servicio y robots industriales: Control de motores para movilidad de robots, manipuladores y grúas.
- Automatización de puertas y portones: Manejo de motores para abrir y cerrar puertas de forma automática.
- Vehículos de juguetes a escala: Control de motores en carros a control remoto o robots de competencia que requieren altos niveles de corriente.
- Sillas de ruedas eléctricas: Manejo de motores en sistemas de movilidad personal.
- Plataformas de carga y transporte: Control de motores en bandas o plataformas transportadoras en procesos industriales.
- Simuladores de movimiento: Para plataformas de simulación que requieren motores de alta potencia para reproducir movimientos realistas.
- Proyectos de automoción DIY: Como bicicletas o scooters eléctricos controlados mediante microcontroladores.
- Sistemas de tracción: Control de motores en aplicaciones de tracción y vehículos autónomos para control de velocidad y dirección.
- Dispositivos de fitness: Control de motores en equipos de gimnasio automatizados, como cintas de correr ajustables.
- Sistemas de producción y ensamblaje: Control de motores en sistemas de movimiento y ensamblaje automatizado en fábricas.
ENLACES EXTERNOS
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…







COMPONENTES ELECTRÓNICOS






COMPONENTES ELECTRÓNICOS

TAMBIÉN TE PODRÍA INTERESAR











DC & MOTORREDUCTORES



Valoraciones
No hay valoraciones aún.