-
×
 Programador USB Blaster ALTERA CPLD/FPGA
1 × $ 97.00
Programador USB Blaster ALTERA CPLD/FPGA
1 × $ 97.00 -
×
 PCA9685 16 Canales PWM I2C 12-Bit
1 × $ 89.00
PCA9685 16 Canales PWM I2C 12-Bit
1 × $ 89.00 -
×
Raspberry Pi Cámara Módulo V2 IMX219 8MP
1 × $ 765.00
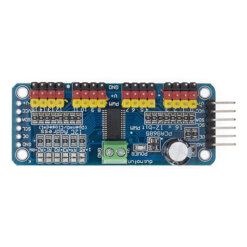 PCA9685 16 Canales PWM I2C 12-Bit
PCA9685 16 Canales PWM I2C 12-Bit  Raspberry Pi Cámara Módulo V2 IMX219 8MP
Raspberry Pi Cámara Módulo V2 IMX219 8MP Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tira Header Macho 40P 2.54mm Diferentes Colores
$ 3.00 – $ 5.00
Tira Header Macho 40P 2.54mm Diferentes Colores
$ 3.00 – $ 5.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
10 Cables Dupont Caiman 20cm Macho / Hembra
$ 47.00
-
Add
Cable Extensión para Servo Macho - Hembra
$ 28.00
-
Add
Cable Dupont Hembra-Hembra
$ 10.00
-
Add
FPGA Altera Cyclone IV EP4CE6 + Carcasa Kit Desarrollo
$ 1,736.00
















Valoraciones
No hay valoraciones aún.