-
×
 Ventilador para Raspberry con Tornillos
1 × $ 51.00
Ventilador para Raspberry con Tornillos
1 × $ 51.00 -
×
 Disipador de Calor Raspberry Pi 3B
1 × $ 14.00
Disipador de Calor Raspberry Pi 3B
1 × $ 14.00
 Disipador de Calor Raspberry Pi 3B
Disipador de Calor Raspberry Pi 3B 

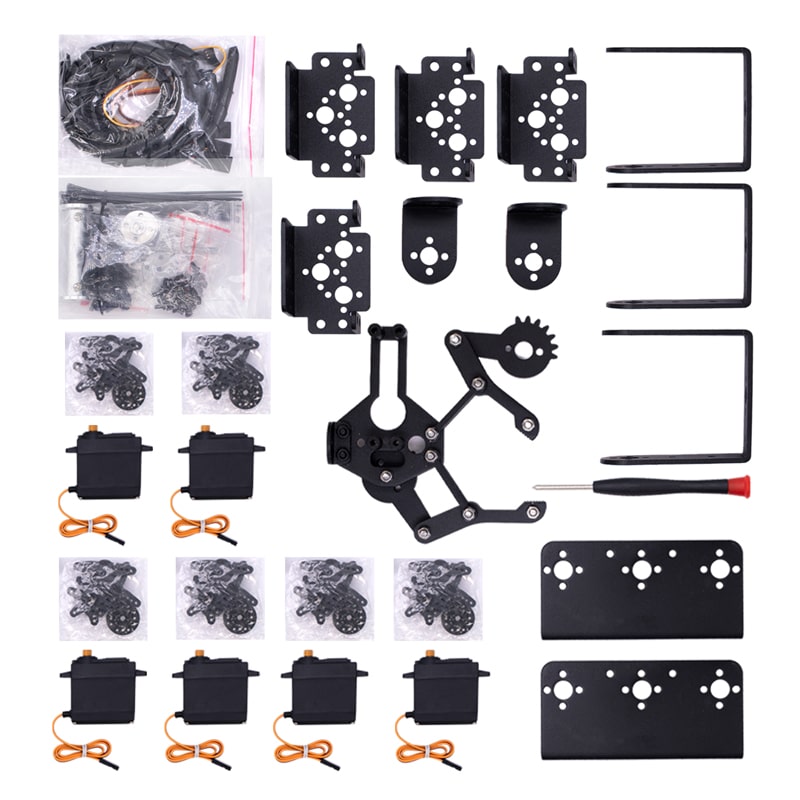

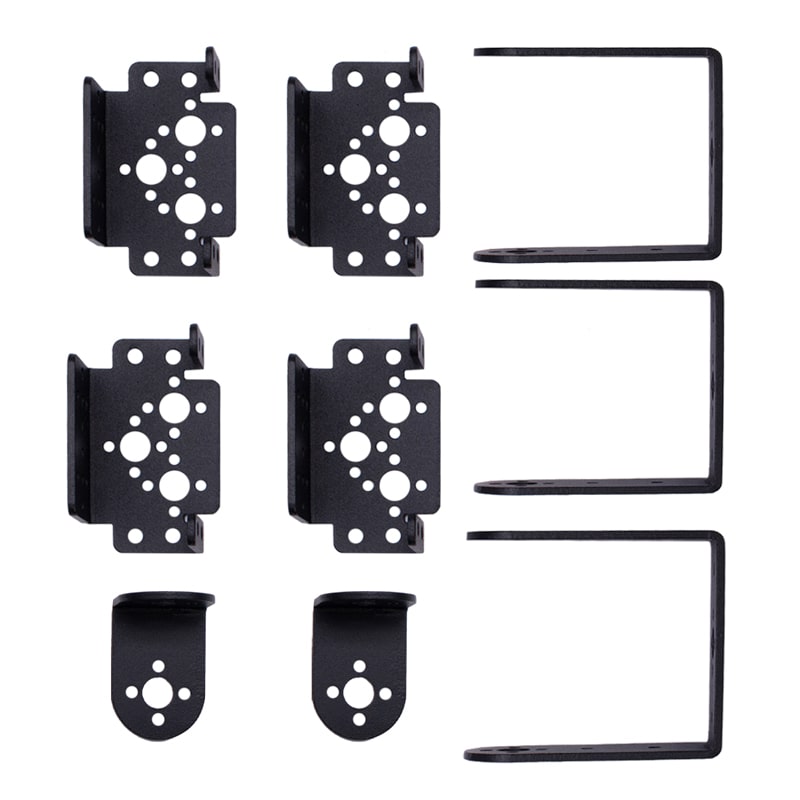
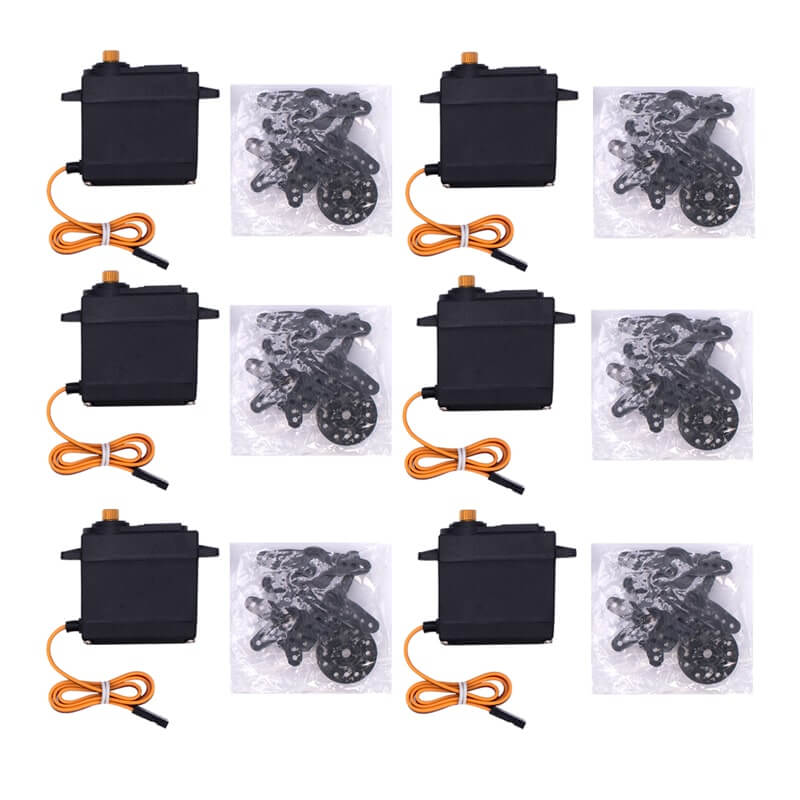











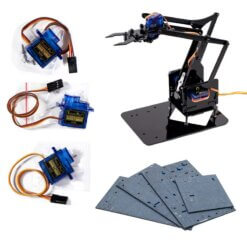
Kit Brazo Robótico 6DOF con Garra y Servos
$ 1,074.00
47 disponibles en TIENDA EN LÍNEA
INFORMACIÓN
El Kit Brazo Robótico 6DOF es una estructura metálica robusta diseñada para simular los movimientos de un brazo humano siendo una herramienta versátil y potente para una amplia gama de aplicaciones que requieren movimientos precisos y complejos como el ensamblaje de componentes, sistemas mecatrónicos quirúrgicos, proyectos DIY, todos los movimientos puede ser controlados a través de microcontroladores como ESP32, Arduino y PICs. Cuenta con:
|
|
|
NOTA: El producto se envía sin ensamblaje, debe ensamblar el kit del robot usted mismo.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Tipo: Kit Brazo Robótico
- Modelo: 6DOF con Garra y Servos
- Material: Aluminio
- Color: Negro
- Voltaje de Operación: 4.8V a 7.2 V DC
- Corriente sin carga: 100mA
- Torque: 10 kg.cm
- Ángulo Limite: 180°
- Tiempo muerto 5 μs
- Servomotores compatibles: MG996
- Dimensiones: 84mm x 90mm x 505mm
- Peso: 897g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Movimientos de Rotación
En la aviación, la robótica y los gráficos por computadora, se utilizan comúnmente los términos «Pitch», «Roll» y «Yaw» para describir los movimientos de rotación de un objeto en el espacio tridimensional.
Pitch
|
Roll
|
Yaw
|
Código de Posicionamiento
Para ensamblar correctamente el brazo debes asegurarte de colocar los servomotores en la posición adecuada, para ello necesitaras un Arduino UNO, un Joystick y el siguiente código:
#include <Servo.h>
Servo myservo;
int pos = 90;
int buttonsw = 7;
int posincrement = 1;
void setup() {
Serial.begin(9600);
pinMode(buttonsw, INPUT_PULLUP);
myservo.attach(9);
delay(100);
myservo.write(90);
}
void loop() {
Serial.print("servo position: "), Serial.print(pos), Serial.write(", "), Serial.println(analogRead(0));
if(!digitalRead(buttonsw)){
pos = 90;
myservo.write(90);
}
if(analogRead(0) < 400){
pos= pos + posincrement;
if(pos > 180) pos = 180;
myservo.write(pos);
}
else if(analogRead(0) > 600){
pos= pos - posincrement;
if(pos < 0) pos = 0;
myservo.write(pos);
}
}
ENLACES EXTERNOS
| Peso | 0.897 kg |
|---|---|
| Dimensiones | 50 × 9 × 9 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…

-17%

El precio original era: $ 364.62.$ 302.64El precio actual es: $ 302.64.

COMPONENTES ELECTRÓNICOS
$ 7.00 – $ 9.00
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto



VIDEO
COMPATIBLES CON ARDUINO
UNO R3 Con Cable ATMEGA328P / SMD CH340G Compatibles con Arduino
(1)
$ 119.00 – $ 188.00
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto


$ 87.00 – $ 120.00
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto

TAMBIÉN TE PODRÍA INTERESAR




-19%
El precio original era: $ 430.52.$ 346.57El precio actual es: $ 346.57.






$ 295.00 – $ 339.00
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto


Valoraciones
No hay valoraciones aún.