








Sensor Ultrasónico US-100 Compensación de Temperatura
$ 94.00
100 disponibles en TIENDA EN LÍNEA
INFORMACIÓN
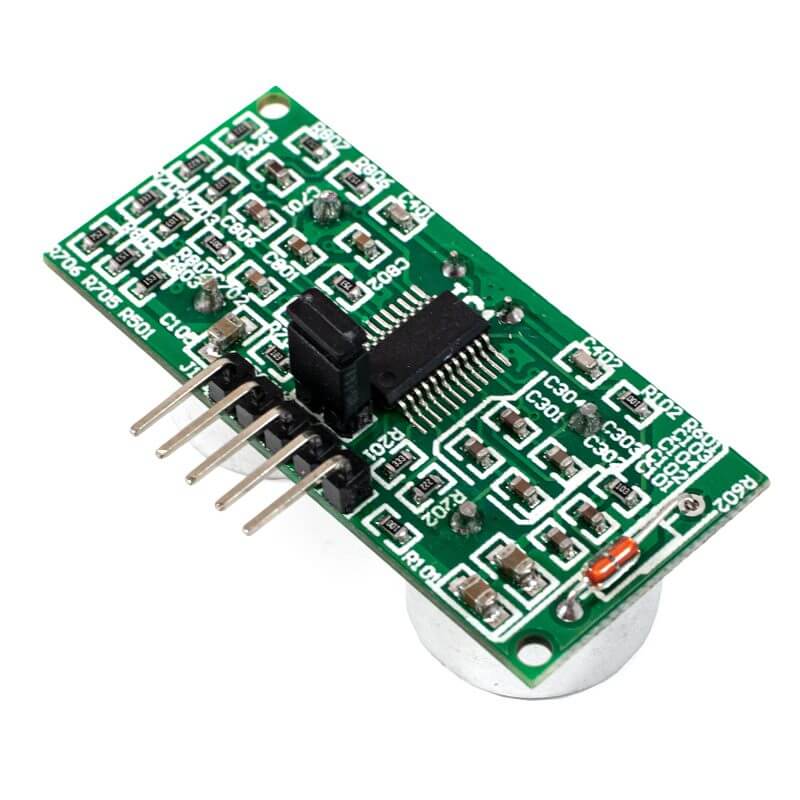
El Sensor Ultrasónico US-100 Compensación de Temperatura es un módulo de medición de distancia ultrasónica US-100, puede medir distancia sin contacto de 2cm hasta 4.5m. Su voltaje de funcionamiento tienen un rango que va desde los 2.4V a 5.5V DC, el consumo de energía estática es inferior a 2mA. Este módulo incorpora un sensor de temperatura que le ayuda a corregir los resultados de medición de distancia. Tienen dos métodos de comunicación UART | TRIG/ECHO además de tener un perro guardián en el interior, por lo que funciona de manera estable y confiable.
Puede ser utilizado en proyectos de robótica como robots laberinto o sumo, y en proyectos de automatización como sistemas de medición de nivel o distancia. El sensor US-100 posee dos transductores: un emisor y un receptor piezoeléctricos, además de la electrónica necesaria para su operación.
ESPECIFICACIÓN Y CARACTERÍSTICAS
- Voltaje de funcionamiento: 2.4V – 5.5V DC
- Corriente de reposo: < 2mA
- Corriente de trabajo: 15mA
- Rango de detección: 2cm – 450cm
- Precisión: 3mm +1%
- Ángulo de detección: 15°
- Frecuencia de trabajo: 40KHz
- Duración mínima del pulso de disparo (nivel TTL): 10 μS.
- Duración del pulso eco de salida (nivel TTL): 100-25000 μS.
- Dimensiones: 45mm x 20mm x 15mm
- Comunicación Serial UART : 9600bps
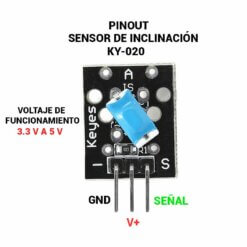
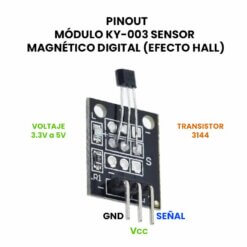
Pines:
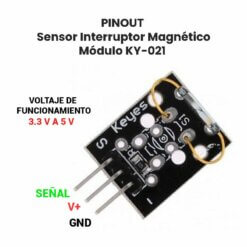
- VCC: (2.4V-5.5V DC)
- TRIG/TX: En modo UART, se conecta al Serial OUT. En modo trigger, este es el trigger ext.
- ECHO/RX: En modo UART, se conecta el Serial IN. En modo trigger, es el echo return.
- GND
- GND
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Modos de comunicación
El sensor tiene 2 modos de comunicación con el microcontrolador, el primer modo es denominado TRIGGER y funciona de igual al sensor HC-SR04, el segundo es el modo UART utilizando comunicación serial UART.
Primer método: El funcionamiento del primer modo es el siguiente: el emisor piezoeléctrico emite 8 pulsos de ultrasonido(40KHz) luego de recibir la orden en el pin TRIG, las ondas de sonido viajan en el aire y rebotan al encontrar un objeto, el sonido de rebote es detectado por el receptor piezoeléctrico, luego el pin ECHO cambia a Alto (5V) por un tiempo igual al que demoró la onda desde que fue emitida hasta que fue detectada, el tiempo del pulso ECO es medido por el microcontrolador y así se puede calcular la distancia al objeto. El funcionamiento del sensor no se ve afectado por la luz solar o material de color negro (aunque los materiales blandos acústicamente como tela o lana pueden llegar a ser difíciles de detectar)
Segundo método: En el modo Serial UART es necesario colocar un jumper en la parte posterior del sensor, luego enviar un (0x55) por el puerto serial hacia el sensor, luego el sensor responderá con 2 bytes que contienen la información de la distancia medida.
La distancia se puede calcular utilizando la siguiente formula:
Distancia(m) = { (Tiempo del pulso ECO) * (Velocidad del sonido=340m/s) } / 2
ENLACES EXTERNOS
| Peso | 0.008 kg |
|---|---|
| Dimensiones | 4.5 × 1.5 × 2 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…
MOVIMIENTO
TAMBIÉN TE PODRÍA INTERESAR








Valoraciones
No hay valoraciones aún.