-
×
 Desoldador de Succión DP-366D
1 × $ 36.00
Desoldador de Succión DP-366D
1 × $ 36.00 -
×
 Porta Pilas Transparente con Interruptor ON OFF
4 × $ 21.00
Porta Pilas Transparente con Interruptor ON OFF
4 × $ 21.00 -
×
Desoldador de Succión Extractor Soldadura Chico Cau-170
1 × $ 127.00
 Porta Pilas Transparente con Interruptor ON OFF
Porta Pilas Transparente con Interruptor ON OFF  Desoldador de Succión Extractor Soldadura Chico Cau-170
Desoldador de Succión Extractor Soldadura Chico Cau-170 Puede que estés interesado en…
-
Add
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
$ 28.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
$ 28.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
Porta Pilas AA Con Plug Para 4/6 Pilas
$ 10.20 – $ 28.00
-
Add
Cautin Tipo Lápiz 30 W Accesorios Pretul 22805
$ 97.00
-
Add
Cautin Tipo Lápiz 30 W Truper 17545
$ 150.00
-
Add
Esponja limpia Cautin
$ 8.00





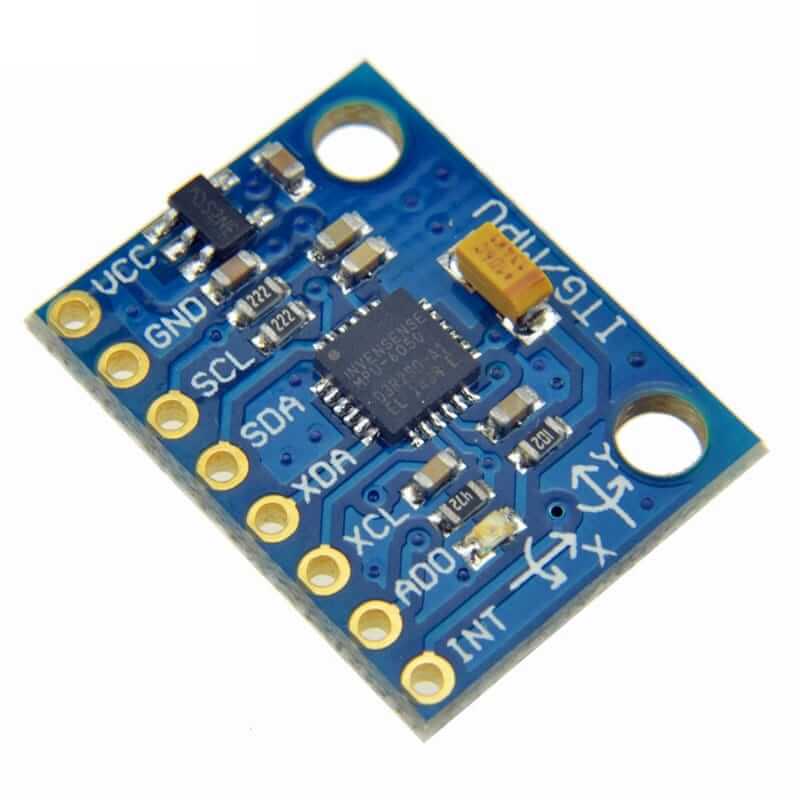
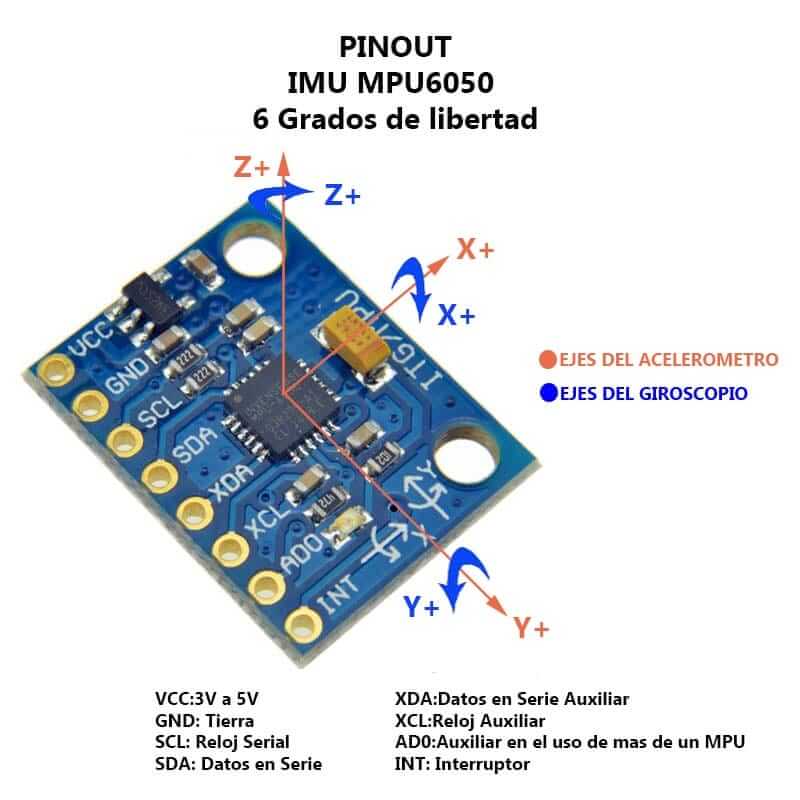
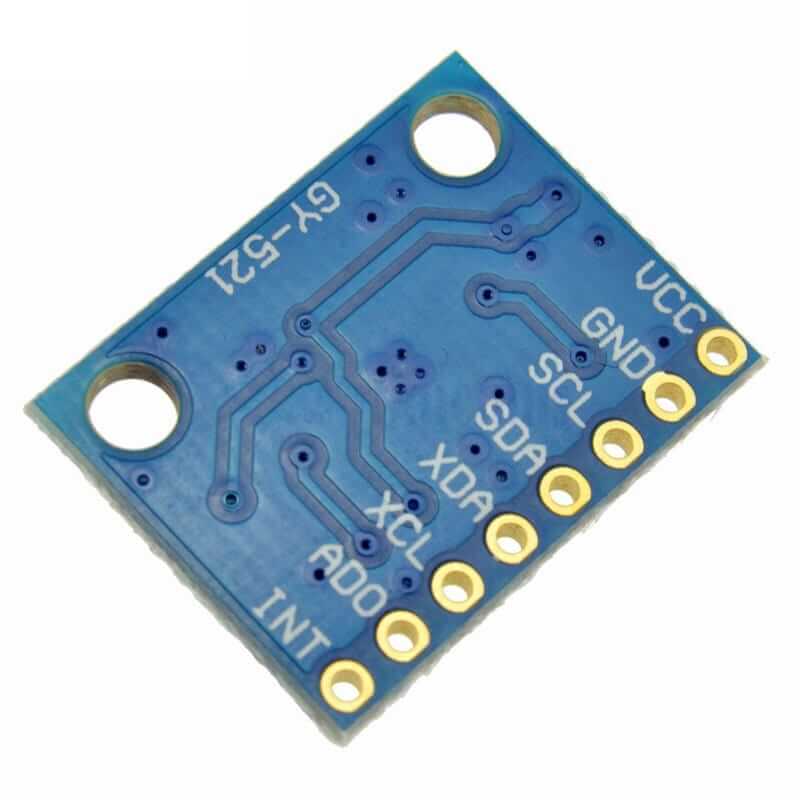
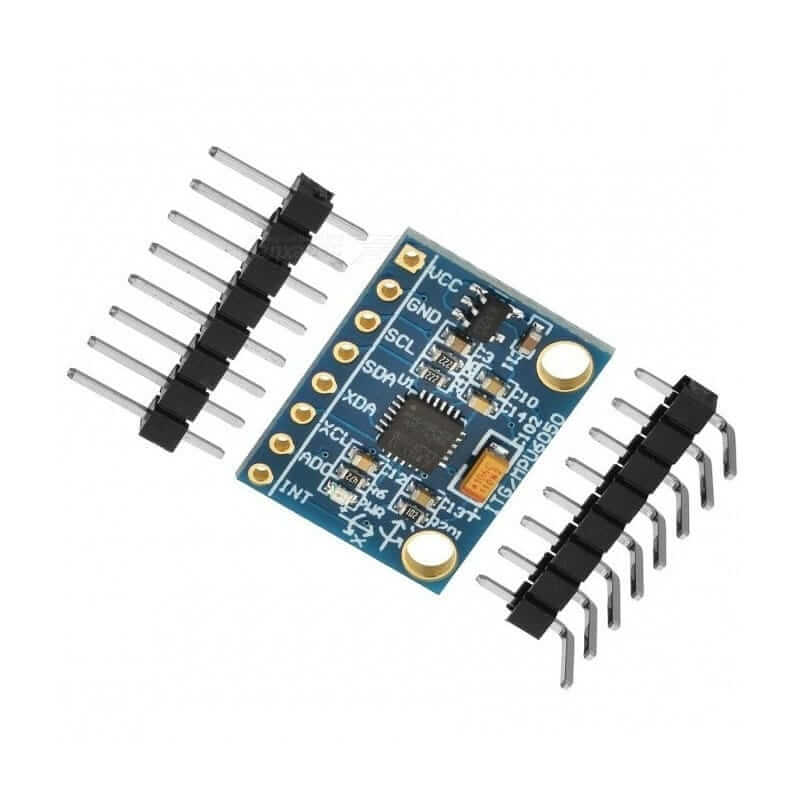




 Conexión del Arduino a MPU-6050 para interfaz de I2C
Conexión del Arduino a MPU-6050 para interfaz de I2C









Valoraciones
No hay valoraciones aún.