-
×
 Raspberry Pi Zero 2 W
1 × $ 490.00
Raspberry Pi Zero 2 W
1 × $ 490.00 -
×
 Tira de Acero Niquelado de 1 Metro 0.15x8mm
1 × $ 16.00
Tira de Acero Niquelado de 1 Metro 0.15x8mm
1 × $ 16.00 -
×
TE-613 Tapete Silicon Térmico 35x25cm
3 × $ 113.00
-
×
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 28.00
-
×
Pasta Térmica 5g
1 × $ 28.00
-
×
Carcasa de Metal para Raspberry Pi 5
2 × $ 300.00
-
×
Pinzas de Microcorte 5''
1 × $ 53.00
-
×
FIT0977 Eliminador 5V 5A USB Tipo C para Raspberry Pi 5
2 × $ 289.00
-
×
SN-01BM Prensa para Terminales XH2.54 PH2.0
1 × $ 349.00
-
×
Sensor IR Rebote SMD ITR8307/S17/TR8(B)
1 × $ 9.00
-
×
Soldador de Gas Tipo Bolígrafo
1 × $ 176.00
-
×
Transformador 6VC/T 1A con Tap Central
1 × $ 153.00
-
×
Raspberry Pi Pico 2 W RP2350
1 × $ 299.00
-
×
HDP135V6 Fuente de Alimentación 0-30V 6A 210W
1 × $ 2,364.00
-
×
Soporte Para Sensor Ultrasónico HC-SR04
1 × $ 11.00
 Tira de Acero Niquelado de 1 Metro 0.15x8mm
Tira de Acero Niquelado de 1 Metro 0.15x8mm  TE-613 Tapete Silicon Térmico 35x25cm
TE-613 Tapete Silicon Térmico 35x25cm  Malla Desoldadora de Cobre 2mm 1.5m CP-2015
Malla Desoldadora de Cobre 2mm 1.5m CP-2015  Pasta Térmica 5g
Pasta Térmica 5g  Carcasa de Metal para Raspberry Pi 5
Carcasa de Metal para Raspberry Pi 5  Pinzas de Microcorte 5''
Pinzas de Microcorte 5''  FIT0977 Eliminador 5V 5A USB Tipo C para Raspberry Pi 5
FIT0977 Eliminador 5V 5A USB Tipo C para Raspberry Pi 5  SN-01BM Prensa para Terminales XH2.54 PH2.0
SN-01BM Prensa para Terminales XH2.54 PH2.0 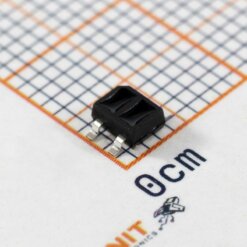 Sensor IR Rebote SMD ITR8307/S17/TR8(B)
Sensor IR Rebote SMD ITR8307/S17/TR8(B)  Soldador de Gas Tipo Bolígrafo
Soldador de Gas Tipo Bolígrafo  Transformador 6VC/T 1A con Tap Central
Transformador 6VC/T 1A con Tap Central 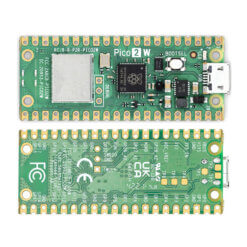 Raspberry Pi Pico 2 W RP2350
Raspberry Pi Pico 2 W RP2350  HDP135V6 Fuente de Alimentación 0-30V 6A 210W
HDP135V6 Fuente de Alimentación 0-30V 6A 210W  Soporte Para Sensor Ultrasónico HC-SR04
Soporte Para Sensor Ultrasónico HC-SR04 Puede que estés interesado en…
-
Add
 UNIT Placa de Expansión para Raspberry Pi Pico
El precio original era: $ 92.01.$ 79.13El precio actual es: $ 79.13.
UNIT Placa de Expansión para Raspberry Pi Pico
El precio original era: $ 92.01.$ 79.13El precio actual es: $ 79.13. -
Add
PShieldX Shield de Expansión para Raspberry Pi Pico
$ 456.00
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
Tira Header Hembra 2.54mm Diferentes Pines
$ 2.00 – $ 8.00
-
Add
Disipadores de Calor para Raspberry Pi 5
$ 108.00
-
Add
Sistema de Enfriamiento Activo para Raspberry Pi 5
$ 201.00








































Valoraciones
No hay valoraciones aún.