




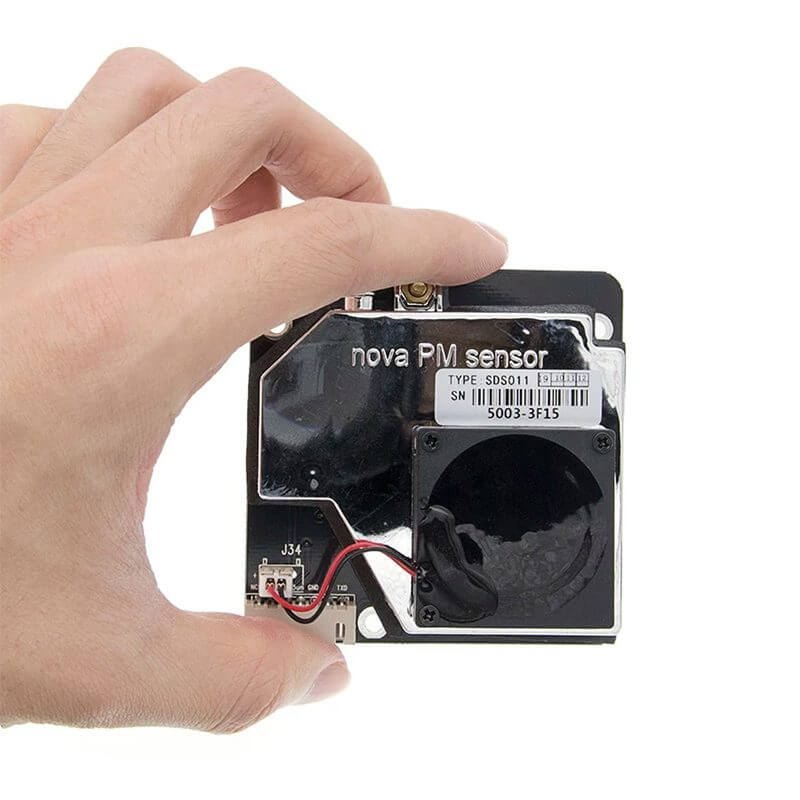







Sensor Nova PM SDS011 Lasér Calidad de Aire
$ 817.00
40 disponibles en TIENDA EN LÍNEA
INFORMACIÓN
Sensor Nova PM SDS011 es un módulo láser de alta precisión PM2.5, utiliza el principio de dispersión láser para obtener la concentración de partículas entre 0.3 a 10μm en el aire. Este sensor tiene salida digital por USB (UART) y ventilador incorporado. Además es preciso con resolución de 0.3 μg/m3 y respuesta rápida de 10 segundos.
Este sensor es ideal para crear diferentes proyectos enfocados a calidad de aire así como realizar proyectos para detectar PM2.5, purificadores, sistemas de filtrado o intercambiadores de aire.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Modelo: Sensor Nova PM SDS011
- Salida de medición: PM2.5, PM10
- Rango: 0.0-999.9 ug / m3
- Voltaje de funcionamiento: 5V DC
- Corriente Máx. de trabajo: 100mA
- Corriente en reposo: 2mA
- Temperatura de trabajo: -20-50 ℃
- Tiempo de respuesta: 1s
- Frecuencia de salida: 1 time/s
- Resolución de diámetro de partículas: Menos de 0.3um
- Error relativo: 10%
- Peso: 60g
- Dimensiones: 71x70x23mm
Incluye:
- Interfaz de comunicación USB con CH340
- Cable de conexión XH2.54mm 7 pines
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Principios de funcionamiento
Se basa en el principio de dispersión láser, puede inducir la dispersión de la luz cuando las partículas atraviesan el área de detección. La luz dispersa se transforma en señales eléctricas, después estas señales serán amplificadas y procesadas. El número y el diámetro de las partículas se pueden obtener mediante análisis porque la forma de onda de la señal tiene ciertas relaciones con el diámetro de las partículas.
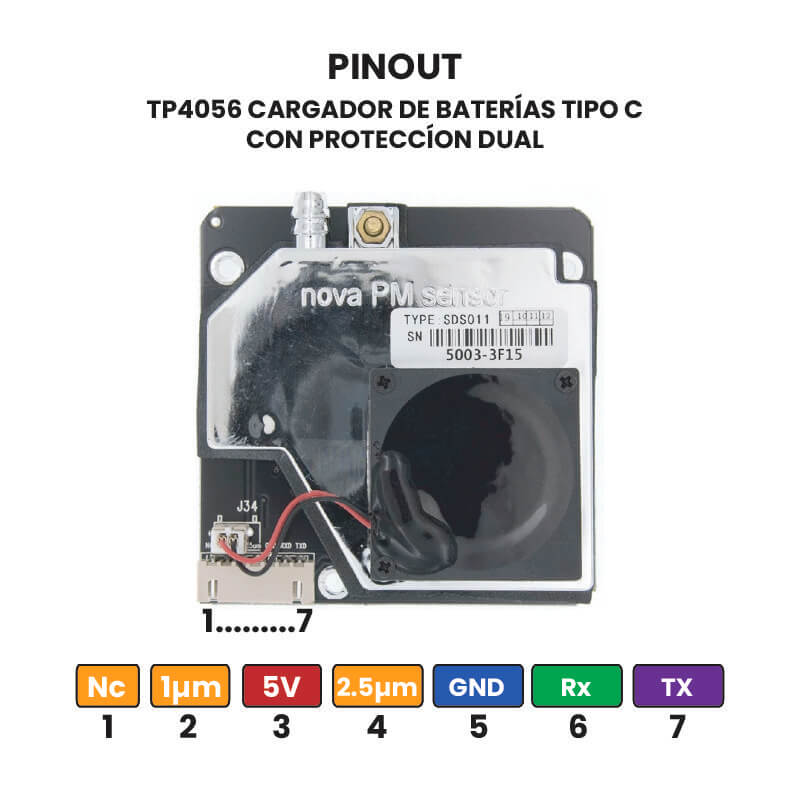
Especificación de interfaz USB
| Pin | Nombre | Explicación |
| 1 | CTL | Pin de control, reservado |
| 2 | 1um | > Concentración de partículas de 0,3 micrones, salida PWM |
| 3 | 5V | Entrada de alimentación de 5 V |
| 4 | 25um | > Concentración de partículas de 2.5 micrones, salida PWM |
| 5 | GND | GND |
| 6 | R | Receptor de puerto serie RX |
| 7 | T | Transmisión de puerto serie TX |
Protocolo de comunicación
- Protocolo de comunicación serie: 9600 8N1. (Tasa de 9600, bits de datos 8, paridad ninguna, bits de parada 1)
- Trama de datos (10 bytes): encabezado del mensaje + orden + datos (6 bytes) + suma de comprobación + tráiler del mensaje
- Ciclo de comunicación de informes en serie: 1 + 0.5 segundos
| Nº de bytes | Nombre | Contenido |
| 0 | message header | AA |
| 1 | order | C0 |
| 2 | data 1 | PM2.5 low byte |
| 3 | data 2 | PM2.5 high byte |
| 4 | data 3 | PM10 low byte |
| 5 | data 4 | PM10 high byte |
| 6 | data 5 | 0(reserved) |
| 7 | data 6 | 0(reserved) |
| 8 | checksum | checksum |
| 9 | message trailer | AB |
ENLACES EXTERNOS
| Peso | 0.06 kg |
|---|---|
| Dimensiones | 7 × 3 × 7.5 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…




TAMBIÉN TE PODRÍA INTERESAR









Valoraciones
No hay valoraciones aún.