





L293D Shield Controlador de Motor
$ 75.00
246 disponibles en TIENDA EN LÍNEA
INFORMACIÓN
El L293D Shield Controlador de Motor es un módulo diseñado para controlar hasta cuatro motores de corriente directa, dos servomotores, cuatro solenoides, cuatro relevadores y dos motores a pasos unipolares o bipolares. Se monta sobre una placa Arduino Uno o Mega. Permite manipular la velocidad y el sentido de giro de los motores conectados, facilitando el control y desarrollo de proyectos de robótica y automatización.
El L293D Shield Controlador de Motor es útil en el uso de motores que demanden demasiada corriente es necesarios alimentar la placa con una fuente externa, esto permitirá que opere de manera correcta.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Tipo de tarjeta o modulo: Shield para Arduino
- Función: Control de motores
- Compatible con tarjetas: Arduino Uno y Arduino Mega
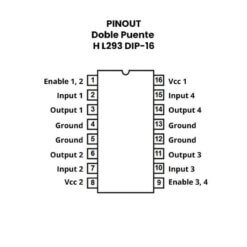
- Circuito principal: L293D y SN74HC595N
- Voltaje:
- Operación: 5 VDC
- Externo para motores: 4.5 a 25 VDC
- Corriente:
- Nominal por salida: 600 mA
- Máxima por salida: 1.2 A
- Conexiones
- Motores DC: Hasta 4 motores con control de velocidad
- Motores a pasos: Hasta 2 motores (unipolares o bipolares)
- Dimensiones: 68 mm x 55 mm x 20 mm
- Peso: 34 g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
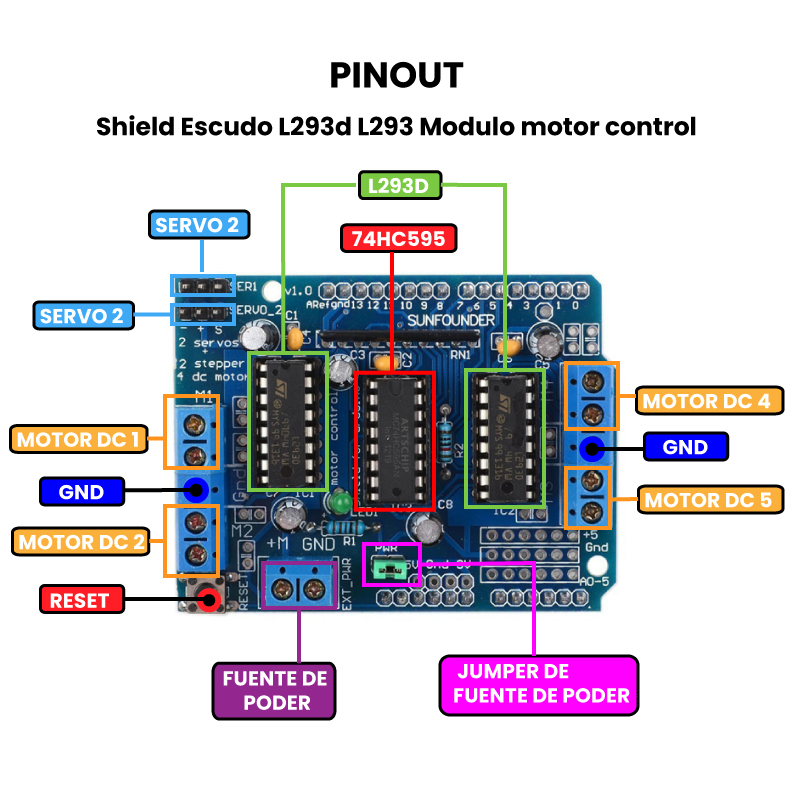
¿Cómo conectar el modulo Shield?
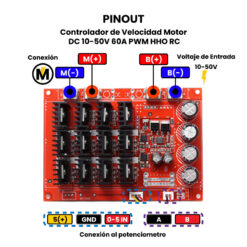
Los motores de corriente directa se conectan en M1 donde corresponden a la primera ranura y segunda. Para el segundo motor se conectan en el M2 que corresponden a la cuarta y quinta ranura. El pin del centro se utiliza para controlar motores paso a paso. Esta misma configuración se utiliza en el M3 y M4. En el caso de motores es posible controlar tanto su velocidad como su dirección de giro.
¿Cómo alimentar los servos?
Las salidas para los servos toman su alimentación directamente de los 5 volts de la placa de Arduino, por lo que se recomienda utilizar pequeños servos tipo hobby.
¿Cómo alimentar servos qué consuman más corriente?
Si requieres emplear servos más grandes de alto consumo de corriente, se recomienda que corte la pista de alimentación V+ en la shield ó el cable positivo del servo y provea su propia fuente a estos. No olvide conectar las tierras correspondientes.
¿Cómo suministrar con una fuente externa?
La alimentación de los motores u otras cargas inductivas la puedes suministrar con una fuente externa, lo único qué tienes qué hacer es retirar el jumper para que el modulo entre en modo alimentación externa. Si utiliza el conector de tornillo del shield tenga en cuenta la polaridad, ya que esta entrada no cuenta con diodo de protección de polaridad y una conexión errada resultará en el daño del modulo y de la placa Arduino. Tampoco conecte la salida regulada de 5 volts ó 3.3 volts de la placa arduino a esta entrada.
| Peso | 0.034 kg |
|---|---|
| Dimensiones | 6.8 × 2 × 5.5 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…




















TAMBIÉN TE PODRÍA INTERESAR
COMPATIBLES CON ARDUINO



COMPATIBLES CON ARDUINO



Valoraciones
No hay valoraciones aún.