-
×
 Tira Led Neopixel 5m WS2812B
1 × $ 318.00
Tira Led Neopixel 5m WS2812B
1 × $ 318.00 -
×
 Porta Pilas Transparente con Interruptor ON OFF
1 × $ 21.00
Porta Pilas Transparente con Interruptor ON OFF
1 × $ 21.00 -
×
Kit 100 LED SMD 0805 5 Colores
1 × $ 35.00
-
×
Kit Componentes Electrónicos para Arduino y Raspberry Pi
1 × $ 236.00
 Porta Pilas Transparente con Interruptor ON OFF
Porta Pilas Transparente con Interruptor ON OFF  Kit 100 LED SMD 0805 5 Colores
Kit 100 LED SMD 0805 5 Colores 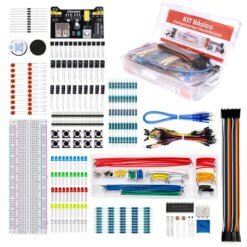 Kit Componentes Electrónicos para Arduino y Raspberry Pi
Kit Componentes Electrónicos para Arduino y Raspberry Pi Puede que estés interesado en…
-
Add
 Eliminador 9V 1A con Plug
$ 53.00
Eliminador 9V 1A con Plug
$ 53.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
Matriz LED Programable 85x23mm Diferentes Colores
$ 220.00 – $ 229.00
-
Add
Raspberry Pi Pico W
$ 178.00
-
Add
Kit de Reloj de Arena Electrónico de 5V
$ 64.00
-
Add
UNIT Starter Kit – Nivel Intermedio con 20 Prácticas
El precio original era: $ 682.00.$ 682.00El precio actual es: $ 682.00.























Valoraciones
No hay valoraciones aún.